Chapter 2 Basic Computer Architecture
2.1 Typical Machine Layout
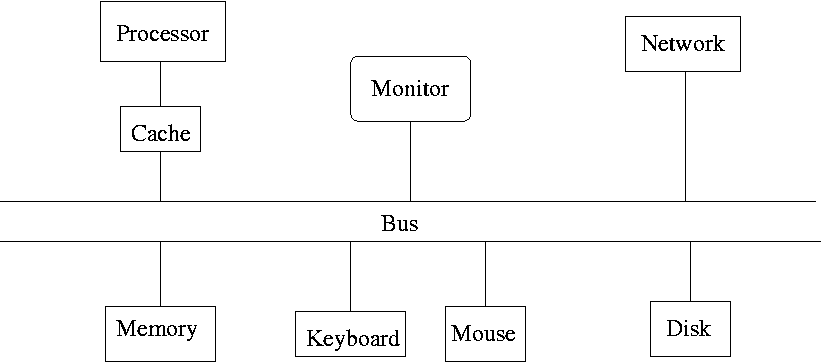
Figure based on M. L. Scott, Programming Language Pragmatics, Figure 5.1, p. 205
2.2 Structure of Lab Workstations
2.2.1 Processor and Cache
luke@l-lnx200 ~% lscpu
Architecture: x86_64
CPU op-mode(s): 32-bit, 64-bit
Byte Order: Little Endian
CPU(s): 8
On-line CPU(s) list: 0-7
Thread(s) per core: 2
Core(s) per socket: 4
Socket(s): 1
NUMA node(s): 1
Vendor ID: GenuineIntel
CPU family: 6
Model: 94
Model name: Intel(R) Core(TM) i7-6700 CPU @ 3.40GHz
Stepping: 3
CPU MHz: 3895.093
CPU max MHz: 4000.0000
CPU min MHz: 800.0000
BogoMIPS: 6816.00
Virtualization: VT-x
L1d cache: 32K
L1i cache: 32K
L2 cache: 256K
L3 cache: 8192K
NUMA node0 CPU(s): 0-7
Flags: ...- There is a single quad-core processor with hyperthreading that acts like eight separate processors
- Each has 8Mb of L3 cache
2.2.2 Memory and Swap Space
luke@l-lnx200 ~% free
total used free shared buff/cache available
Mem: 32866464 396876 27076056 33620 5393532 31905476
Swap: 16449532 0 16449532- The workstations have about 32G of memory.
- The swap space is about 16G.
2.2.3 Disk Space
Using the df command produces:
luke@l-lnx200 ~% df
Filesystem 1K-blocks Used Available Use% Mounted on
...
/dev/mapper/vg00-root 65924860 48668880 13884156 78% /
/dev/mapper/vg00-tmp 8125880 28976 7661092 1% /tmp
/dev/mapper/vg00-var 75439224 13591304 57992768 19% /var
/dev/mapper/vg00-scratch 622877536 33068 622844468 1% /var/scratch
...
netapp2:/vol/grad 553648128 319715584 233932544 58% /mnt/nfs/netapp2/grad
...
netapp2:/vol/students 235929600 72504448 163425152 31% /mnt/nfs/netapp2/students
...- Local disks are large but mostly unused
- Space in
/var/scratchcan be used for temporary storage. - User space is on network disks.
- Network speed can be a bottle neck.
2.2.4 Performance Monitoring
Using the top command produces:
top - 11:06:34 up 4:06, 1 user, load average: 0.00, 0.01, 0.05
Tasks: 127 total, 1 running, 126 sleeping, 0 stopped, 0 zombie
Cpu(s): 0.0%us, 0.0%sy, 0.0%ni, 99.8%id, 0.2%wa, 0.0%hi, 0.0%si, 0.0%st
Mem: 16393524k total, 898048k used, 15495476k free, 268200k buffers
Swap: 18481148k total, 0k used, 18481148k free, 217412k cached
PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND
1445 root 20 0 445m 59m 23m S 2.0 0.4 0:11.48 kdm_greet
1 root 20 0 39544 4680 2036 S 0.0 0.0 0:01.01 systemd
2 root 20 0 0 0 0 S 0.0 0.0 0:00.00 kthreadd
3 root 20 0 0 0 0 S 0.0 0.0 0:00.00 ksoftirqd/0
5 root 0 -20 0 0 0 S 0.0 0.0 0:00.00 kworker/0:0H
6 root 20 0 0 0 0 S 0.0 0.0 0:00.00 kworker/u:0
7 root 0 -20 0 0 0 S 0.0 0.0 0:00.00 kworker/u:0H
8 root RT 0 0 0 0 S 0.0 0.0 0:00.00 migration/0
9 root RT 0 0 0 0 S 0.0 0.0 0:00.07 watchdog/0
10 root RT 0 0 0 0 S 0.0 0.0 0:00.00 migration/1
12 root 0 -20 0 0 0 S 0.0 0.0 0:00.00 kworker/1:0H
13 root 20 0 0 0 0 S 0.0 0.0 0:00.00 ksoftirqd/1
14 root RT 0 0 0 0 S 0.0 0.0 0:00.10 watchdog/1
15 root RT 0 0 0 0 S 0.0 0.0 0:00.00 migration/2
17 root 0 -20 0 0 0 S 0.0 0.0 0:00.00 kworker/2:0H
18 root 20 0 0 0 0 S 0.0 0.0 0:00.00 ksoftirqd/2
...Interactive options allow you to kill or renice (change the priority of) processes you own.
The command
htopmay be a little nicer to work with.A GUI tool,
System Monitor, is available from one of the menus. From the command line this can be run asgnome-system-monitor.
Another useful command is ps (process status)
luke@l-lnx200 ~% ps -u luke
PID TTY TIME CMD
4618 ? 00:00:00 sshd
4620 pts/0 00:00:00 tcsh
4651 pts/0 00:00:00 psThere are many options; see man ps for details.
2.3 Processors
2.3.1 Basics
Processors execute a sequence of instructions
Each instruction requires some of
- decoding instruction
- fetching operands from memory
- performing an operation (add, multiply, …)
- etc.
Older processors would carry out one of these steps per clock cycle and then move to the next.
Most modern processors use pipelining to carry out some operations in parallel.
2.3.2 Pipelining
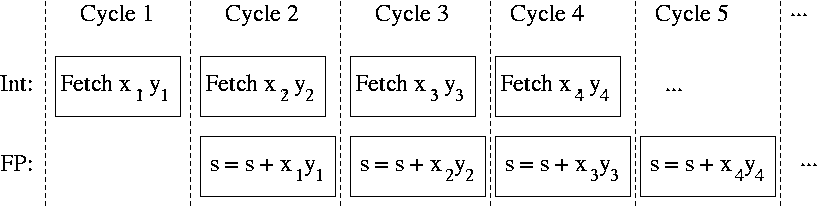
A simple example:
Simplified view: Each step has two parts,
- Fetch \(x_i\) and \(y_i\) from memory
- Compute \(s = s + x_i y_i\)
Suppose the computer has two functional units that can operate in parallel,
- An Integer unit that can fetch from memory
- A Floating Point unit that can add and multiply
If each step takes roughly the same amount of time, a pipeline can speed the computation by a factor of two:
- Floating point operations are much slower than this.
- Modern chips contain many more separate functional units.
- Pipelines can have 10 or more stages.
- Some operations take more than one clock cycle.
- The compiler or the processor orders operations to keep the pipeline busy.
- If this fails, then the pipeline stalls.
2.3.3 Superscalar Processors, Hyper-Threading, and Multiple Cores
Some processors have enough functional units to have more than one pipeline running in parallel.
Such processors are called superscalar.
In some cases there are enough functional units per processor to allow one physical processor to pretend like it is two (somewhat simpler) logical processors. This approach is called hyper-threading.
- Hyper-threaded processors on a single physical chip share some resources, in particular cache.
- Benchmarks suggest that hyper-threading produces about a 20% speed-up in cases where dual physical processors would produce a factor of 2 speed-up
Recent advances allow full replication of processors within one chip; these are multi core processors.
- Multi-core machines are effectively full multi-processor machines (at least for most purposes).
- Dual core processors are now ubiquitous.
- The machines in the department research cluster have two dual core processors, or four effective processors.
- Our lab machines have a single quad core processor.
- Processors with 6 or 8 or even more cores are available.
Many processors support some form of vectorized operations, e.g. SSE2 (Single Instruction, Multiple Data, Extensions 2) on Intel and AMD processors.
2.3.4 Implications
Modern processors achieve high speed though a collection of clever tricks.
Most of the time these tricks work extremely well.
Every so often a small change in code may cause pipelining heuristics to fail, resulting in a pipeline stall.
These small changes can then cause large differences in performance.
The chances are that a “mall change” in code that causes a large change in performance was not in fact such a small change after all.
Processor speeds have not been increasing very much recently.
Many believe that speed improvements will need to come from increased use of explicit parallel programming.
More details are available in a talk at
http://www.infoq.com/presentations/click-crash-course-modern-hardware
2.4 Memory
2.4.1 Basics
Data and program code are stored in memory.
Memory consists of bits (binary integers)
On most computers
- Bits are collected into groups of eight, called byte.
- There is a natural word size of \(W\) bits.
- The most common value of \(W\) is still 32; 64 is becoming more common; 16 also occurs.
- Bytes are numbered consecutively, \(0, 1, 2, \dots, N = 2^W\).
- An address for code or data is a number between \(0\) and \(N\) representing a location in memory, usually in bytes.
- \(2^{32} = 4,294,967,296 = 4\text{GB}\).
- The maximum amount of memory a 32-bit process can address is 4 Gigabytes.
- Some 32-bit machines can use more than 4G of memory, but each process gets at most 4G.
- Most hard disks are much larger than 4G.
2.4.2 Memory Layout
A process can conceptually access up to \(2^W\) bytes of address space.
The operating system usually reserves some of the address space for things it does on behalf of the process.
On 32-bit Linux the upper 1GB is reserved for the operating system kernel.
Only a portion of the usable address space has memory allocated to it.
Standard 32-bit Linux memory layout:

Standard heap can only grow to 1G.
malloc implementations can allocate more using memory mapping.
Obtaining large amounts of contiguous address space can be hard.
Memory allocation can slow down when memory mapping is needed.
Other operating systems differ in detail only.
64-bit machines are much less limited.
The design matrix for \(n\) cases and \(p\) variables stored in double precision needs \(8np\) bytes of memory.
| \(p = 10\) | \(p = 100\) | \(p = 1000\) | |
| n = 100 | 8,000 | 80,000 | 800,000 |
| n = 1,000 | 80,000 | 800,000 | 8,000,000 |
| n = 10,000 | 800,000 | 8,000,000 | 80,000,000 |
| n = 100,000 | 8,000,000 | 80,000,000 | 800,000,000 |
2.4.3 Virtual and Physical Memory
To use address space, a process must ask the kernel to map physical space to the address space.
There is a hierarchy of physical memory:
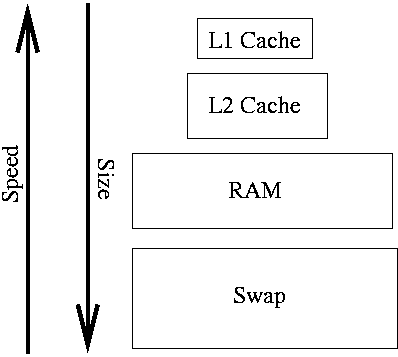
Hardware/OS hides the distinction.
Caches are usually on or very near the processor chip and very fast.
RAM usually needs to be accessed via the bus
The hardware/OS try to keep recently accessed memory and locations nearby in cache.
A simple example:
msum <- function(x) {
nr <- nrow(x)
nc <- ncol(x)
s <- 0
for (i in 1 : nr)
for (j in 1 : nc)
s <- s + x[i, j]
s
}
m <- matrix(0, nrow = 5000000, 2)
system.time(msum(m))
## user system elapsed
## 1.712 0.000 1.712
fix(msum) ## reverse the order of the sums
system.time(msum(m))
## user system elapsed
## 0.836 0.000 0.835 - Matrices are stored in column major order.
- This effect is more pronounced in low level code.
- Careful code tries to preserve locality of reference.
2.4.4 Registers
Registers are storage locations on the processor that can be accessed very fast.
Most basic processor operations operate on registers.
Most processors have separate sets of registers for integer and floating point data.
On some processors, including i386, the floating point registers have extended precision.
The i386 architecture has few registers, 8 floating point, 8 integer data, 8 address; some of these have dedicated purposes. Not sure about x86_64 (our lab computers).
RISC processors usually have 32 or more of each kind.
Optimizing compilers work hard to keep data in registers.
Small code changes can cause dramatic speed changes in optimized code because they make it easier or harder for the compiler to keep data in registers.
If enough registers are available, then some function arguments can be passed in registers.
Vector support facilities, like SSE2, provide additional registers that compilers may use to improve performance.
2.5 Processes and Shells
A shell is a command line interface to the computer’s operating system.
Common shells on Linux and MacOS are bash andtcsh`.
You can now set your default Linix shell at https://hawkid.uiowa.edu/.
Shells are used to interact with the file system and to start processes that run programs.
You can set process limits and environment variables the shell.
Programs run from shells take command line arguments.
2.5.1 Some Basic bash/tcsh Commands
hostname prints the name of the computer the shell is running on.
pwd prints the current working directory.
ls lists files a directory
lslists files in the current directory.ls foolists files in a sub-directoryfoo.
cd changes the working directory:
cdorcd ~moves to your home directory;cd foomoves to the sub-directoryfoo;cd ..moves up to the parent directory;
mkdir foo creates a new sub-directory foo in your current working directory;
rm, rmdir can be used to remove files and directories; BE VERY CAREFUL WITH THESE!!!
2.5.2 Standard Input, Standard Output, and Pipes
Programs can also be designed to read from standard input and write to standard output.
Shells can redirect standard input and standard output.
Shells can also connect processes into pipelines.
On multi-core systems pipelines can run in parallel.
A using the bash shell script P1.sh:
#!/bin/bash
while true; do echo $1; doneand the rev program can be run as
bash P1.sh fox
bash P1.sh fox > /dev/null
bash P1.sh fox | rev
bash P1.sh fox | rev > /dev/null
bash P1.sh fox | rev | rev > /dev/null2.5.3 The proc File System
The proc file system allows you to view many aspects of a process.