Induction Motor ControlA small adventure with my Taig lathe
Part of
the Making Stuff collection
Copyright © 2018. This work may be transmitted or stored in electronic form on any computer attached to the Internet or World Wide Web so long as this notice is included in the copy. Individuals may make single copies for their own use. All other rights are reserved. |
|
|
I got a new (second hand) motor, a Bodine 42R5BFCI. This is a 1700 RPM 1/6 hp PSC motor that draws 1.9A at 115V 60Hz. This motor is much more efficient than the old one, almost silent and totally enclosed. For a lathe this size, 1/6 hp seems to be plenty (Taig recommends 1/6 to 1/4 hp), and since I started using this motor, I have never noticed the loss of 1/12 hp, even when turning steel. (Note adde 2021: More power would have helped when I used this lathe to trepan a 2.5 inch disk from 1/3 inch thick steel plate.)
On the downside, the old motor had 3 wires, while the new one has 6 (2 for an aftermarket thermal cutoff). My goal in changing the motor was to make no changes to the control panel because space under the lathe headstock is very tight. This web page discusses the choices I faced in connecting the new motor to the existing lathe control switches.
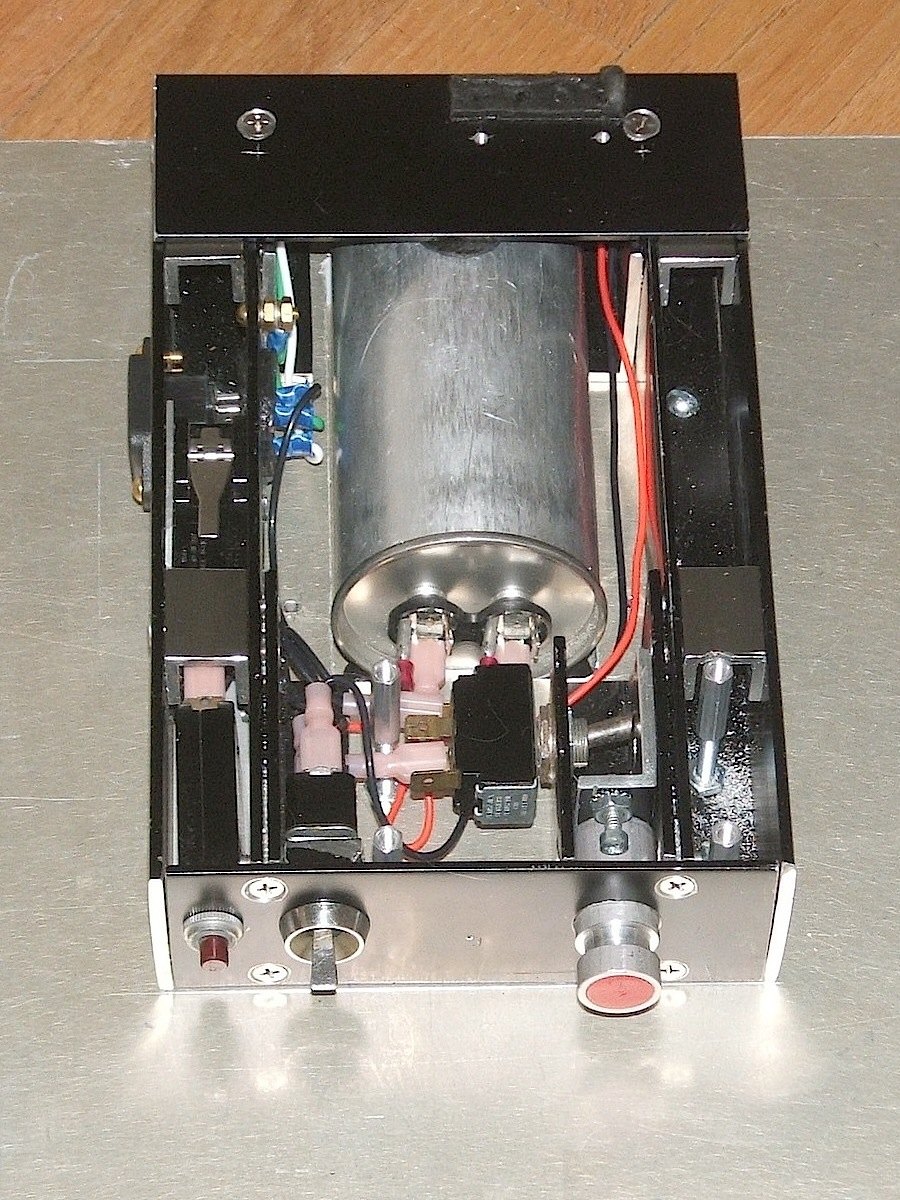
As you can see in the photo, the lathe base that houses the control system is small, just 5.5 by 8.5 inches (14 by 21.6 cm) overall, with a 2 inch (5 cm) depth excepting a well for the old motor-run capacitor that is 2.75 inches (7 cm) deep.

The old control system
The original motor has a thermal cutoff embedded in the motor windings that cuts the motor power when the temperature is within 15°C of the motor's 105°C limit, and a slow-blow 2.5A thermal circuit breaker mounted on the front panel. In addition, there is a microswitch to shut off the power if the lid over the control circuits is opened or the belt guard is removed. The primary front panel controls are the main on-off switch and a double-throw center-off direction switch. All the switches have 1/2 hp or higher ratings stamped on them.
You might ask, why a direction switch on a lathe? Lathes are designed to cut in the forward direction, and it is actually unsafe to run a lathe in reverse when the workpiece is held in a chuck that screws onto the spindle. Reverse running is only safe when the workpiece is held in a collet that is directly wedged into the spindle taper without any intermediate screw-on fixtures.
The control system shown in the above schematic only works for single-phase 3-wire PSC motors where the two motor windings are identical. The capacitor value is specified on the motor nameplate.
The original wiring is typical of small appliance wiring, which is to say, it is reasonably safe. This lathe is less powerful than some mixmasters, and the control system is less complex than the speed controls of such machines. Nonetheless, it would be nice to have the off-switch completely isolate the motor from the power line instead of simply disconnecting the hot side of the line. In theory, the neutral wire should be at ground when no current is flowing, but I have encountered wall outlets that are miswired, with hot and neutral interchanged. In such a context, this control wiring leaves all of the motor wiring hot when the switch is in the off position. This would be considered unsafe in the context of larger motors.
The new motor has a thermal cutoff embedded in the motor windings, as with the original, but its leads are brought out from the motor housing and must be externally connected and the leads are much finer than the leads to the motor winding. This cutoff was added after the motor was made. The windings in the new motor are independent and are not identical (the resistances are 8Ω and 20Ω). This means that the two windings cannot be combined into the three-wire configuration of the old motor. The motor nameplate specifies a 15 µF capacitor; this goes in series with the high resistance winding. Reversing the motor is done by reversing the polarity of either motor winding relative to the other.
Bodine has published the torque versus speed curve for the motor I got. This indicates a starting torque 10% above the rated torque and a peak torque that is almost 3 times the rated torque. The motor running a lathe is always started with no tool loading, so the only thing it has to do is overcome the inertia of the motor plus headstock plus workpiece.
At the rated power output of 1/6 hp, the motor's cooling fan can keep the motor windings just below their temperature limit (105°C for insulation class A) when the cooling air temperature is at the nameplate operating temperature of 40°C. In use, the new motor can deliver over 1/3 hp for short bursts, limited by the thermal inertia of the motor windings, and if the cooling air is colder than 40°C, sustained power outputs above 1/6 hp are possible. For a decent tutorial on thermal protection of motor windings, see Basics of built-in motor protection for engineers beginners.
In a lathe, the workpiece is brought up to speed and then subject to arbitrary loading depending on how the operator feeds the cutting tool into the work. If the operator feeds the tool fast enough, the motor can stall. It is difficult for the operator to know the actual motor load, although tables of lathe speeds and feeds are based, in part, on the power required to cut various materials, along with considerations of tool wear and surface finish. As a result, lathe motors should generally be fitted with thermal cutoffs.
Note that all of my control proposals for the new motor retain the circuit breaker as it was. This will blow rather quickly if the motor stalls, since typical stall (and starting) currents for induction motors are 5 times the rated current. An applications note from Omron on Product Safety Precautions suggests in Section 2-1-1 that motor starting currents should be estimated as 5 to 10 times the steady state current. Thermal protectors embedded in the motor windings cannot reliably protect against a motor stall because, at stall, the windings warm up quite rapidly and the thermal inertia of the thermal switch may delay its response until the motor is already over temperature.
Bodine provides a helpful note on How to Wire a New 3-Wire-Reversible WX or FX Permanent Split Capacitor AC Gearmotor into a 4-Wire System. Bodine's solution involves adding a single-pole single-throw relay to the output of the existing 4-wire control system to reverse the three wire motor. Unfortunately, they do not provide advice on how to wire a 4-wire PSC motor into a 3-wire system, the problem I face here.

A bad control system design
My first thought was to put the thermal cutout in series with the circuit breaker and lid closed switch, but once I was forced to recognize that relays are involed, it makes more sense to wire to the thermal cutout in the the "pilot" circuit driving the on-off relay. Once you admit the need for a pilot circuit and on-off relay, it makes sense to put the on-off switch in the pilot circuit instead of the main circuit. Here, I show a double-pole on-off relay that disconnects both sides of the motor from the line when the power is off.
That leaves the problem of reversing the motor. A double-pole double-throw switch in the power path to any motor winding would suffice, but the existing single-pole single-throw front panel switch is in very cramped quarters and is much narrower than double-pole switches that are rated to handle motors this size. Bodine, in a gearmotor blog posting on how to connect a reversing switch, recommends using either a 3-pole or 4-pole center-off switch so that the center position disconnects all motor windings. Such switches are far too big for my control panel. These considerations forced me to add a second relay for reversing the motor.
This design is less functional than the original because the reversing switch has only two logical positions, reversed and not-reversed. Even if the physical switch has a center-off position, this does not cut the power to the motor. When the machine is parked, it would be nice if leaving both the power and reversing switches in their off positions provided useful redundant protection against accidental starting. Accidentally starting a lathe while you are mounting a workpiece can be very dangerous, even for a small lathe such as the one in question. Building a reversing circuits with forward, off and reverse states requires two relays in the reversing circuit instead of one for the on-off function and one for the reverse function.
|
Arcing always occurs simultaneously on both poles of the switch, since they are in series in the current path. As the relay opens, it stretches the arcs. If the arcs persist until the relay contacts finish swinging across the gap between contacts, the result is a short circuit across the power supply. As current through the motor falls, one arc will extinguish, whichever has even infinitessimally higher resistance. The other arc, however, is short circuiting the power supply and will continue at least until the next zero crossing in the supply voltage, and possibly longer if enough contact material has been vaporized. Even if the short is just transient, this is not good for the relay!
Relays with AC coils have a shaded pole, which means that the magnetization in the pole will persist strongly enough to hold the relay closed for as much as 1/4 cycle of the AC power line, about 5ms for a 60-cycle line. The IDEC RH-series relays, rated at 10 amps or 1/6 hp, are a good candidate for use here; the data sheet for that family of relays gives a maximum contact opening time of 25ms, suggesting that the actual contact swing probably takes about 20ms, which is on the order of one full cycle of the AC power line. While contact arcs usually extinguish in 1/2 cycle, an inductive load such as a motor can drive an arc that lasts longer. All of these risks are reduced if we can guarantee that the motor will not be reversed under power -- for example, by an interlock that prevents throwing the reversing switch when the motor is on.
Mechanical interlocks to prevent reversing a power tool while it is in use are common on impact wrenches and power drills. See, for example, U.S. Patents 3,422,296 and 3,703,646. Mechanical interlocks preventing one switch from being thrown while another is in the wrong position are in widespread use; many of these are devices that are attached over the top of or beside the switches being controlled. See, for example, U.S. Patents 3,432,628, 3,492,448, 4,924,041 5,393,942, 5,436,415, 7,411,139 and 8,552,318. A feature common to many of the latter interlocks is a sliding or pivoting element that interferes with the toggle handle of one switch when the other switch is in the wrong position. I added such an interlock to the push-pull on-off button, but that's the subject of a separate writeup.
In addition, there is the risk of contact welding or material transfer between relay contacts leading to mechanical locking of the contacts. The Picker Components note contact arcing includes a good close-up photograph of an old relay contact illustrating this problem. Relay contacts are frequently mounted on long spring fingers, so the possibility of one contact locking in one position while the other contacts remain free and swing to the opposite position should not be ignored. If this occurs in the reversing relay in the above circuit, the result shorts the power supply.
Contact welding can be caused by the high current that flows during motor starting, or the high current that flows in the event that the motor stalls under load. Turning off the motor during the starting surge or when it is stalled poses the greatest threat of contact arcing because the starting and stall currents of an induction motor are typically 5 times the rated running current.
Arcing, contact welding or latching in the on-off relay used here poses no safety threat, although it will limit the relay life. Furthermore, so long as the reversing relay is never switched under power, the contacts there should never be subject to arc damage. Again, this points toward the value of interlocking the on-off and reverse functions.
Use of a snubber could limit the severity of all problems caused by arcing (more about this later). This does not mean that we can rely on the snubber to prevent arcing; rather, we use it to limit arcing and defer its consequences. The safety of the system should never be assessed based on the assumption that the snubbers work.
Numerous tutorial sites recommend variations on this unsafe design:
Fortunately, the bulk of these tutorials assume small low-voltage motors, but low voltage, by itself, does not prevent arcing or contact welding. If you open the circuit to a 12-volt automotive starter motor, you will get a powerful arc because starter motors draw hundreds of amps, and that current will try to continue flowing despite the contacts being open. Unlike the situation with AC relays, there are no zero crossings in the current through a DC arc that help the arc to self-extinguish.

A solution using interlocked relays
This solution uses interlocked relays. It is based on the kind of circuits commonly used for heavy industrial motors, where, instead of relays, large contactors are used.
In the above schematic, 4-pole double-throw (form C) relays are shown, but all of the power connections to the motor are done with only the normally-open contacts, ignoring the normally-closed ones. That is, we are using form-C contacts as if they were form A. The only normally-closed contacts used here are in the low-current pilot circuit that powers the relay coils. Here, we are using form-C contacts as if they were form B. This is in keeping with the traditional construction of contactors, where power is generally handled by single-throw normally-open contacts (form A or, for really high power, form X), and the only double-throw or normally-closed contacts are auxiliary low-power contacts.

|
In the industrial control settings where this circuit is typically found, the electrical interlocking shown here is typically augmeted by mechanical interlocks that link the two relays, mechanically preventing one from closing unless the other is open (see, for example, U.S. Patent 3,710,288). Thus, these circuits prevent shorting of the power line with two levels of redundancy, one mechanical and one electrical.
| |
| |
|
Closing the left relay in this circuit turns on the motor in the forward direction. Closing the right relay turns on the motor in the reverse direction. With both relays open, the motor is off, and as already noted, closing both relays shorts the supply unless interlocking is used to prevent this.
The interlocking does not prevent applying power to the motor while the shaft is still spinning the wrong way. If this is done, the motor will draw even more than the normal starting current of the motor, so it is definitely not a good idea. As already mentioned, adding some kind of mechanical interlock to prevent access to the reverse switch while the motor is on can help here by forcing the user to operate the on-off switch both before and after touching the reversing switch.
The electrical interlocking shown here offers significant benefit even if the user can instantaneously throw the reverse switch while the motor is running. With the electrical interlocking shown, this will not immediately apply power to the previously unpowered relay coil. Instead, the interlocking contact on the previously powered relay must close before any power is delivered to the other relay. This will only happen after the formerly powered relay fully releases. If we assume that each relay takes from 20 to 25 ms to operate, as discussed above for IDEC RH-series relays, this implies that the complete system will take from 40 to 50 ms to reverse. This gives significant time for any arcing to die down in the relay contacts before the opposite polarity contacts close.
With this circuit, both relays are subject to potential problems with arcing, although with a lathe, where most use is made in the forward direction, the forward relay will be the one that sees the most use and suffers from the most arc damage. Nonetheless, both relays are likely to eventually suffer damage from arcing, and either relay could eventually end up with welded or latched contacts as a result.
If there is contact welding or locked contacts holding one of the power relay contacts in the reversing circuit closed, turning on the other relay invites an immediate short circuit unless The locked or welded contacts prevent that relay's armature from swinging far enough to close interlock contact. Some relays with force-guided contacts guarantee that no contact will close in one direction if any contacts hang up in the opposite direction. Unfortunately, many relays do not offer this guarantee. Even when it is not guaranteed, however, relays with stiff contact springs on the moving contacts and rigidly mounted fixed contacts may offer some degree of force guided behavior.
One disadvantage of this circuit is that the second motor winding is only partially disconnected from the circuit when the motor is switched off. As already mentioned, the neutral wire in household electric circuits is not guaranteed to be at ground, and this can present hazards to someone working on the lathe without unplugging it. A sensible user would take this precaution, but it would be nice if 5-pole relays were widely available so that 4 of the relay contacts could be used to fully disconnect the motor while the 5th was used for interlocking. Unfortunately, small inexpensive relays with 5 poles with the appropriate rating are not available.
Note that, if the direction switch is in its center-off position and the on-off switch is off, the temperature switch in the motor is isolated from the power line. This "double off" switch setting is the normal way to store the machine, and it means that there is no power to the thermal switch should someone try to disconnect the motor while the lathe is plugged in.
Another disadvantage of this circuit is that it is not really suitable for use with high-current 4-pole double-throw relays. Relays contacts rated to carry 5 or 10 amps are frequently not recommended for currents of only a few milliamps. An applications note from Omron on Product Safety Precautions states, in Section 2-2-11, that a single relay should never be used to switch both a large load and a microload. The problem is, the broad flat contact surfaces used for large loads develop a thin layer of metal oxide, and with only a few milliamps of load current, the local heating around a small puncture in this layer is not enough to burn it away to create a good contact. Furthermore, any arcing in the power circuit will spatter oxidized debris onto the low-current contacts, creating an even thicker oxide layer. Commonplace 4-pole relays are symmetrical, with all 4 poles identical, rated for the same current, and in the same enclosure. In contrast, high power contactors sometimes have auxiliary contacts rated for much lower signalling currents, mounted on the same actuating mechanism and mechanically protected from damage by arc spatter.
Most presentations of this solution use ladder diagrams:
Ladder notation is sufficiently different from conventional schematic notation that newcomers to power electronics may find it difficult. The first citation above gives a decent tutorial before presenting an interlocked motor control circuit. Note also that most of these presentaitons replace the on-off switch with a pilot relay that latches on when the momentary-on button is pushed and that falls to the off position of any of a number of momentary off switches are closed, including the off button and various safety interlocks such as the temperature switch.
An applications note from Omron on Product Safety Precautions suggests this approach in Section 2-1-7 in bare-bones outline form without ladder notation.

A relatively safe solution
| |
| |
| |
|
This circuit only applies power to the motor windings if the relays are in opposite states. As with the electrically interlocked relay solution, we can view the left relay as the forward relay and the right relay as the reverse relay, but the off state is more complex. Here, if both relays are on or if both are off, the motor is disconnected. The center-off reversing switch prevents the both-on condition, but should it occur because of a near-impossible switch failure, it does not present a hazard.
In the absence of arcing, although opposing contacts in the double-throw relays are all in use, the wiring is such that when one contact is carrying power, the opposing contact, shown in grey in the illustrations, is isolated from the circuit.
Consider what happens when one of the relays opens the circuit, with an arc across its contacts. We can ignore the lower two relay contacts that power the capacitor winding because they are merely on-off contacts and cannot short the power supply. Assume that the arcs persist in the upper contacts until the contacts reach the far side, this does not short anything unless the other relay also changes state while the arc is still hot. Where the interlocked relay solution always had two arcs in series, this solution only creates danger when there are 4 arcs in series. Since longer arcs quench faster, arcing in this circuit can be expected to pose a less severe threat than in the interlocked circuit.
When both relays change state simultaneously all four contacts in each current path will arc because they are wired in series. Whichever arc in this path quenches first will immediately cause the others to quench. With 4 arcs in series, energy is dissapated in the arcs at twice the rate it would be with only 2 arcs in series, so any arcs in this circuit should quench much faster than they would in the bad or interlocked circuits presented above.
Now, consider what happens if a contact latches up or down. First, there is a chance that the latched contact will prevent the other contacts from closing in the opposite direction. In this case, the result is that the motor will not run. Now, suppose the other contacts do close. The result is still an open circuit to that motor winding. The result will be a motor that fails to start because only one of the two motor windings is energised. A short circuit will only result if both relays have stuck or welded contacts.
The disadvantage of this solution, compared to the interlocked solution, is that both relays are in series, so a total of 4 relay contacts are in series with each motor winding when the motor is on, while the interlocked solution put only two relay contacts in series with each motor winding. The datasheet for IDEC RH-series relays indicates a maximum contact resistance of 50mΩ. These relays are a good candidate for this application (the RH4B-U AC120V relay is a 4PDT 10-amp relay rated at 1/6 HP with a 120V AC coil that draws about 19.5MA). A contact resistance of 1/20Ω is low enough that putting 4 contacts in series in each path through the motor should not be a problem.
Putting contacts in series has benefits as well as costs. For arcing, contact welding or contact latching, two relay contacts in series would need to be involved before the failure shorts the power supply. This is extremely unlikely. This is why, in most presentations of the the interlocked solution, high-power form-X contactors are assumed. With these, each connection has two contacts in series in order to divide the arc when the contacts open.
This clever solution is recommended here:
The circuits shown above are not complete for several reasons: First, the low-current pilot circuit should be protected by a low current fuse, allowing lighter wiring to be used in the pilot circuit than in the main circuit. Second, we need to worry about arc suppression.
There is a second arcing problem. The datasheets for 4-pole relays from several manufacturers including IDEC contain identical and somewhat garbled language listing among the precautions for use of their relays the following:
|
The IDEC RH-series relays already discussed have arc barriers between each set of contacts, but it still makes good sense to minimize the opportunities for arcing between adjacent sets of contacts. These barriers are only a few millimeters high. This creates a relatively long path from an arc between the contacts of one pole and the nearest fixed contact of an adjacent pole, but it is important to note that the path from an arc to the moving contact of an adjacent pole is shorter.
In the light of the above, it makes sense to arrange the wiring to minimize the voltage differences between adjacent poles. Simply exchanging the wiring between two of the relay poles makes a significant difference, although it makes the schematic diagram uglier:

Interchanging the middle poles to reduce interpole arc risks
In the case of the leftmost relay, the 4 poles connected to the 120V input in the original alternated so that the full line voltage was across each pair of adjacent poles. By exchanging the middle two poles, we have two groups of two adjacent poles with no voltage between them. Inter-pole arcing between the two groups is still possible, but striking this arc will be difficult because the currents to the two motor windings on opposing sides of this potential arc are out of phase with each other.
In the case of the rightmost relay, the 4 poles connected to the motor windings are arranged so that no two adjacent poles are connected to the same motor winding. An arc between two poles connected to different motor windings can only be sustained if there is a second inter-pole arc to complete the circuit. This is unlikely, and in addition, striking an arc between poles connected to different motor windings is difficult because the currents in the two windings are out of phase. If one winding is at full current, able to strike vigorous arcs, the other one will have a current significantly below its peak, and the arc at the adjacent pole of the relay will not be very energetic.
Arc suppresson is recommended by essentially all relay manufacturers whenever a relay is used to drive an inductive load. Arc suppression can vary from devices that actively sense the presence of an arc and briefly short the relay contacts to kill the arc, to simple passive devices such as resistors-capacitor networks. See US Patents 7145758 and 8619395 for examples of active suppression devices.
Simple RC networks and transient voltage suppressors also work. See Inductive Load Arc Suppression, an applications note by Littlefuse for a discussion of such solutions. The datasheet for IDEC RH-series relays contains a discussion of the relative merits of several contact protection circuits. For a more detailed discussion, see the Picker Components applications note on Relay Contact Life.
Both back-to-back Zener diodes and varistors can be used as transient voltage suppressors. Back-to-back Zener diodes have relatively small capacitance. They are close to being ideal voltage limiters, non-conductive below their breakdown voltage and conductive above it. In contrast, metal-oxide varistors (MOVs) can be modeled as a series of capacitors, each shorted by a low-voltage ideal voltage limiter. The capacitance of an MOV can adsorb some current while the voltage is below the breakdown voltage of the device, delaying the onset of arcing.
The biggest objection to MOVs is that they are "one time use" devices that fail by short circuiting. This is clearly acknowledged in the Littlefuse LA Varistor Series datasheet, where curves are given for repetitive surge capacity. MOVs have definitely limited lifetime when used to protect against power surges caused by lightning or similar threats. These surges involve tens or even hundreds of amps for several milliseconds. In contrast, the motor discussed here draws only 2 amps under normal load. The appropriate MOV for this application, the V130LA20, has an indefinite life at such low currents, probably longer than the lifetime of the relay (the IDEC RH-series relays are rated to survive 50 million cycles).
What we need is one arc suppressor across each motor winding. In the case of the capacitor winding, the suppressor goes on the relay-side of the capacitor. In general, PSC motors with high resistance capacitor windings tend to be designed so that this winding resonates; the result is an AC voltage across the motor winding itself that is significantly higher than the line voltage. This is part of the reason why the Bodine nameplate for this motor specifies a 350V 15µF capacitor on a 120V motor.
A fuse in the pilot circuit is appropriate, since this has a much lower current than the primary circuit. For the IDEC IDEC RH-series relays, the 4-pole 120V AC relay coil draws only 16.5mA in the steady state. During the time the relay armature is moving, the current is higher because the relay magnet is doing work. Put another way, the inductance of the relay coil increases as the armature moves to the closed position, so the initial current rise when the relay is turned on exceeds the current that will pass once the armature closes. The Omron applications note on Product Safety Precautions suggests in Section 2-1-1 that relay coil inrush currents are typically 2 to 3 times the steady state current. The inrush will only last as long as it takes to close the relay, a matter of 20 or so milliseconds, so a normal general purpose (also known as a fast-acting) fuse that blows in about one second with a current double the fuse rating will hardly notice this brief pulse. One benefit of adding a fuse to the pilot circuit is that it allows the pilot circuit to be wired with lighter wire than is used for primary power to the motor; for this purpose, an inexpensive 1/4 amp fuse is probably a better choice because 20mA fuses are comparatively expensive.
A resistor across the capacitor is a good idea. With two relays in series isolating the capacitor winding when the motor is off, this capacitor will hold a charge for a long time. Capacitors used with PSC induction motors usually use a polypropylene film dielectric; these capacitors have very low leakage, meaning that they can store a considerable amount of energy for many minutes after they are disconnected from the circuit. A resistor to bleed off this charge protects anyone who opens the case from a potential shock hazard.
For a 15µF capacitor rated at 350V (as required by our motor), a 500KΩ resistor is about the smallest that will dissapate 1/4 Watt (a lower resistances will conduct more current and dissapate more power when the machine is on; the closest standard resistor value is 470KΩ). The RC time constant for this capacitor and resistor is 7.5 seconds. That is, in 7.5 seconds, the capacitor will discharge from 350V to about 128 volts. In 15 seconds, the voltage will fall to 47V, and in 30 seconds, to about 6 volts. Given that a user will typically turn off the machine and unplug it before starting to remove the screws on the cover over the wiring, it will be difficult to gain access to the wiring this quickly, so a 500KΩ bleeder resistor provides sufficient protection.

The relatively safe solution with added detail

|
I soldered the wiring
on the bottom of the relay sockets before mounting the socket assembly on
the base. Because it is so crowded, I insulated all of the solder joints on
the relay sockets and lined the well in the base with fish paper. Many of the
Faston connectors
on the switches are very close to exposed metal parts, so in
both the original and new control systems, I used connectors with
insulating shrouds.
The new motor and its new control system have worked well, but it has one problem: If you leave the switches in the on position and then plug in the lathe, or if the lathe is plugged in and you attach the belt guard after pushing the on button, it will immediately start spinning. Many small appliances and power tools work this way, so this does not bother me too much, but larger power tools usually have control systems that avoid this risk.
If I were starting over, I would replace the on-off switch in the pilot circuit with a single-pole normally-open relay and two push buttons, a red normally open "push to stop" button, and a green normally-closed "push to start" button. This way, no matter how the lathe is stopped, you would have to deliberately push the start button to restart it.

Pilot circuit changed to push-on, push-off control
This design still requires a mechanical interlock so that it is impossible to throw the reverse switch except when the off button is held down.
An alternative common on large machine tools uses three push buttons, one for stop, one to start the machine in the forward direction, and one to start the machine in the reverse direction. This requires either additional pilot contacts on the main control relays or a pair of pilot relays, one to to run the machine forward and one to run it in reverse. For a lathe, where reverse running is a very special case, the reverse-start button needs, at the very least, a safety cover. I consider a 3-button control system for this lathe to be overkill.






